Датчики частоты вращения двигателя используются в системах управления двигателем для:
- измерения числа оборотов двигателя
- определения положения коленчатого вала (положение поршня двигателя)
Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
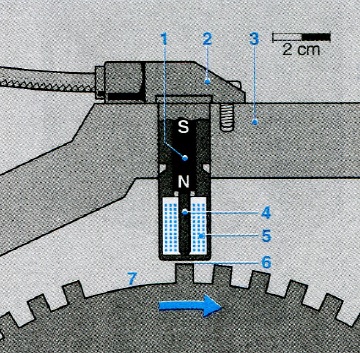
Рис. Индуктивный датчик скорости вращения (конструкция):
- Постоянный магнит
- Корпус датчика
- Корпус двигателя
- Полюсный контактный штифт
- Обмотка
- Воздушный зазор
- Зубчатое колесо с точкой отсчета
Конструкция и принцип действия Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнитомягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита. Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя. Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ… > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
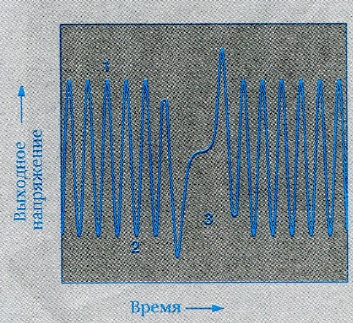
Рис. Сигнал индуктивного датчика скорости вращения двигателя:
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.

Рис. Принцип работы дифференциального датчика Холла:
- а Расположение датчика
- b Сигнал датчика Холла
- большая амплитуда при маленьком воздушном зазоре
- маленькая амплитуда при большом воздушном зазоре
- с Выходной сигнал
- Магнит
- Датчик Холла 1
- Датчик Холла 2
- Зубчатое колесо
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/ шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR-датчики
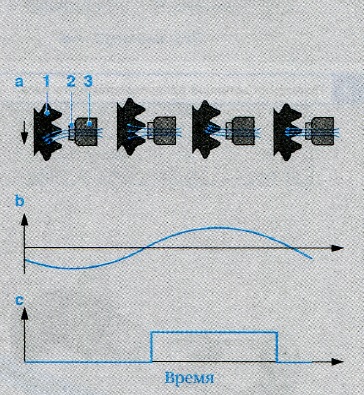
Рис. Принцип определения числа оборотов с помощью датчика AMP:
- а Размещение
- в различные моменты времени
- b Сигнал датчика AMP
- с Выходной сигнал
- Импульсное (активное) колесо
- Сенсорный элемент
- Магнит
Электрическое сопротивление магнито-резистивного материала (AMP, анизотропный магниторезистивный) является анизотропным. Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в AMP-датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо. В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR-датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками AMP здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР-датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
Датчик частоты вращения коленчатого вала предназначен для синхронизации управления системой впрыска и системой зажигания, поэтому другое название датчика – датчик синхронизации. В некоторых источниках информации датчик носит название – датчик начала отсчета. Сигналы от датчика используются системой управления двигателем для установления:
- момента впрыска топлива;
- количества впрыскиваемого топлива;
- момента зажигания (бензиновые двигатели);
- угла поворота распределительного вала при работе системы изменения фаз газораспределения;
- времени включения клапана адсорбера при работе системы улавливания паров бензина.
Наибольшее распространение получил датчик частоты вращения коленчатого вала индуктивного типа. В некоторых системах управления двигателем устанавливается датчик синхронизации, построенный на эффекте Холла.

Индуктивный датчик представляет собой магнитный сердечник с расположенной вокруг него обмоткой. Принцип работы датчика заключается в наведении электродвижущей силы в обмотке при взаимодействии магнитного поля датчика с металлическим задающим диском (диском синхронизации).
Задающий диск имеет по окружности 58 зубьев с пропуском на два зуба, т.н. диск типа 60-2. На отдельных дизельных двигателях для ускорения определения положения коленчатого вала и, соответственно, облегчения запуска устанавливается задающий диск типа 60-2-2 (с двумя пропусками через 180°).
При вращении коленчатого вала впадины зубьев задающего диска изменяют магнитный поток, вследствие чего в обмотке датчика формируется электрический импульс.
Датчик синхронизации позволяет определять два параметра:
- частоту вращения коленчатого вала;
- точное положение коленчатого вала.
Число оборотов коленчатого вала определяется по количеству зубьев, проходящих через датчик в единицу времени. Пропуск зубьев служит в качестве исходной точки для определения положения коленчатого вала. Он соответствует, как правило, нахождению поршня первого цилиндра в верхней мертвой точке.
Датчик частоты вращения коленчатого вала, построенный на эффекте Холла, взаимодействует с задающим диском несколько иной конструкции. Диск выполнен в виде металлических сегментов, разделенных металлическими вставками. Сегменты представляют собой постоянные магниты с чередующими северными и южными полюсами. В качестве начала отсчета используется сегмент большей ширины. Таким образом, получился задающий диск типа 60-2.
При неисправности датчика частоты вращения коленчатого вала (отсутствии сигнала) двигатель останавливается и повторно не запускается.
Датчики частоты вращения двигателей ЯМЗ-5340, ЯМЗ-536.
Сенсорные системы распределительного вала и коленчатого вала используются для определения положения ВМТ поршней двигателя. Каждая сенсорная система состоит из импульсного колеса (с отверстиями по кругу) и соответствующего датчика, которым определяются положения вала и угловые соотношения (так называемая «синхронизация» валов). Эти данные в свою очередь, предоставляют информацию о положении поршня двигателя.
Положения коленчатого и распределительного валов определяется с помощью датчиков частоты вращения двигателя DG6.
Датчик частоты вращения двигателя DG6 является пассивным, индуктивным (или генераторным) датчиком.
Устройство и принцип работы датчика частоты вращения двигателя.
Датчик монтируется напротив ферромагнитного импульсного колеса 7 (например, закрепленного на маховике коленчатого вала) и отделен от него воздушным зазором. Датчик содержит мягкий железный сердечник 4 (полюсный наконечник), который окружен катушкой индуктивности 5. Полюсный наконечник соединен с постоянным магнитом 1. Магнитное поле проходит через полюсный наконечник внутрь импульсного колеса. Интенсивность магнитного потока, проходящего через катушку, зависит от того, что находится напротив датчика зуб или паз (отверстие) импульсного колеса. Зуб вызывает усиление, а паз, наоборот, ослабление интенсивности магнитного потока. Эти изменения наводят (индуцируют) в катушке электродвижущую силу (ЭДС), выражаемую в синусоидальном выходном напряжении которое пропорционально частоте вращения вала. Амплитуда переменного напряжения сильно растет с увеличением частоты вращения (от нескольких мВ до 100 В). Достаточная для регистрации датчиком амплитуда возникает, начиная с частоты вращения вала, равной 30 мин -1 .
Геометрические формы паза (отверстия) и полюсного наконечника должны соответствовать друг другу. Система обработки сигналов преобразует выходное напряжение с импульсами синусоидальной формы с переменной амплитудой (аналоговый синусоидальный сигнал) в напряжение с импульсами прямоугольной формы с постоянной амплитудой (цифровой сигнал). Аналого-цифровое преобразование осуществляется в микропроцессоре блока управления.
Индуктивный датчик частоты вращения коленчатого вала (устройство).

1 – постоянный магнит; 2 – корпус датчика; 3 – картер маховика; 4 – полюсный наконечник; 5 – катушка индуктивности; 6 – воздушный зазор; 7 – импульсное колесо с опорной меткой (маховик).
График сигнала индуктивного датчика частоты вращения коленчатого вала.

1 – зуб; 2 – паз (отверстие) между зубьями; 3 – опорная метка.
Датчик частоты вращения коленчатого вала.
Датчик частоты вращения коленчатого, рисунок 10, также называемый датчиком скорости двигателя или датчиком синхронизации, установлен в верхней части картера маховика с правой стороны, если смотреть со стороны маховика.
С помощью датчика частоты вращения коленчатого вала определяется частота вращения и угловое положение коленчатого вала относительно верхней мёртвой точки (ВМТ) в цилиндрах двигателя (или положение поршня). По показаниям датчика ЭБУ рассчитывает момент впрыска и количество впрыскиваемого топлива для каждого отдельного цилиндра.
Частота вращения рассчитывается по времени периода импульсов датчика.
Сигнал датчика частоты вращения – одна из самых важных величин для системы электронного управления двигателем.
Датчик частоты вращения коленчатого вала DG6.


Импульсное колесо датчика одновременно является маховиком, на наружном диаметре которого имеются 58 (60 минус 2) радиальных отверстий, расположенных через 6°. Пробел в 18° (два отсутствующих отверстия) является базовой меткой и служит для определения углового положения коленчатого вала двигателя в пределах 360° и увязан с определенным положением коленчатого вала по отношению к ВМТ первого цилиндра. Маховик ориентирован с помощью штифта и закреплен на коленчатом валу.
Маховик.


Характеристика датчика.
- Сопротивление катушки при 20°С: Rw = 860 Ом ±10%;
- Индуктивность на частоте 1 кГц (последовательное подключение): 370 ± 60 мГн (без намагничивающихся деталей крепежа);
- Воздушный зазор (расстояние между датчиком и импульсным колесом): 0,3…1,8 мм.
Конфигурация разъёма.
Разъём индуктивного датчика частоты вращения коленчатого вала имеет 2 контакта. Экранирование соединительного кабеля подключено к проводу «масса» ЭБУ и не имеет электрического соединения с внешней оболочкой датчика (корпус датчика изготовлен из полиамида).
Конфигурация разъёма (распиновка).


Контакт 1 (провод 2.23) – ЭБУ контакт 2.23 масса датчика;
Контакт 2 (провод 2.19) – ЭБУ контакт 2.19 выходной сигнал.
Датчик частоты вращения распределительного вала.
Датчик частоты вращения распределительного вала, называемый также датчиком фазы, аналогичен датчику частоты вращения коленчатого вала и установлен на картер маховика с левой стороны, если смотреть со стороны маховика в районе распределительного вала, рисунок 4. Вал вращается с половинной скоростью вращения коленчатого вала. Блок управления, получая сигналы от датчика распределительного вала, определяет положение поршня первого цилиндра в ВМТ на такте сжатия и обеспечивает последовательное впрыскивание топлива в соответствие с порядком работы цилиндров двигателя.
Импульсное колесо датчика одновременно является шестерней распределительного вала и называется фазовой шестерней.
Шестерня распределительного вала шестицилиндрового двигателя.

1 – датчик частоты вращения распределительного вала DG6; 2 – синхронная метка; 3 – установочная метка положения распределительного вала.
На торце шестерни выполнены в виде аксиальных отверстий фазовые метки на каждый цилиндр. Количество отверстий составляет Z+1, где Z – число цилиндров, а 1 – дополнительное отверстие, используемое для синхронизации (например, для шестицилиндровых двигателей количество отверстий 6+1). Дополнительное отверстие или синхронная метка 2 имеет определенный угловой интервал по отношению к отверстию цилиндра и расположена сразу за одной из фазовых меток. Метка служит для определения углового положения распределительного вала двигателя в пределах 720° поворота коленчатого вала.
Фазовые метки через равномерные промежутки распределены по шестерне, тем самым, вместе с датчиком коленчатого вала, ЭБУ определяет начало воспламенения топлива в ВМТ 1-го цилиндра.
Определение ВМТ 1-го цилиндра, вид со стороны маховика.

1 – датчик частоты вращения распределительного вала; 2- датчик частоты вращения коленчатого вала; 3 – пробка смотрового отверстия для определения ВМТ 1-го цилиндра.
Конфигурация разъёма.
Конфигурация разъёма датчика частоты вращения распределительного вала приведена на рисунке.
Конфигурация разъёма (распиновка).

Контакт 1 (провод 2.09) – ЭБУ контакт 2.09 выходной сигнал;
Контакт 2 (провод 2.10) – ЭБУ контакт 2.10 масса датчика.
Отказ датчиков частоты вращения двигателя анализ числа оборотов.
С помощью датчиков частоты вращения коленчатого вала и частоты вращения распределительного вала блок управления способен точно определять положение поршня и порядок работы цилиндров. При выходе из строя одного из датчиков двигатель способен запуститься и воспринимать ограниченную нагрузку. Вся необходимая информация (частота вращения двигателя и вычисление порядка работы цилиндров) поступает, в этом случае, с одного датчика DG6.
Процесс пуска при неисправных датчиках.
При отказе одного из датчиков частоты вращения пуск двигателя и его работа возможны.
При работе только с датчиком частоты вращения коленчатого вала в процессе пуска осуществляются пробные впрыски топлива в ВМТ такта выпуска и в ВМТ такта сжатия, так как система ЭСУД без датчика распределительного вала сначала должна найти «правильную» ВМТ, в которой происходит воспламенение. При распознавании блоком управления повышения частоты вращения, т.е. переход с частот прокрутки вала двигателя стартером 80-200 мин -1 до холостого хода 700-750 мин -1 (воспламенение топлива), «правильная» ВМТ им будет найдена, двигатель пустится, и будет работать как с обоими датчиками.
При работе только с датчиком частоты вращения распределительного вала блок управления по запрограммированной в нем коррекции угла позволяет определять «правильный» момент впрыска топлива и без точного распознавания угла коленчатого вала.
Диагностика неисправности датчика.
Диагностика, на предмет исправности датчик DG6, может быть осуществлена путем измерения сопротивления между контактами разъёма. Сопротивление катушки составляет приблизительно 860 Ом ±10%. Этот метод, однако, не дает достоверной информации о функциональности, потому что есть вероятность того, что обрыв провода в катушке не определился.