Назначение рулевого управления
Для осуществления движения транспортного средства (ТС) по выбираемой водителем траектории служит рулевое управление (РУ), конструкция которого во многом определяет безопасность движения и утомляемость водителя. К рулевому управлению ТС предъявляются специфические требования, основными из которых являются:
- обеспечение высокой маневренности ТС
- легкость управления (за счет применения усилителей рулевого управления)
- обеспечение по возможности чистого качения (без бокового скольжения) всех колес ТС при поворотах (за счет правильной конструкции привода)
- автоматическая стабилизация управляемых колес, т.е. возвращение их в состояние прямолинейного движения после снятия воздействия со стороны водителя
- необратимость рулевого управления — отсутствие передачи ударов управляемых колес о неровности дороги на руки водителя
- обеспечение следящего действия (любое воздействие водителя на рулевое управление должно вызывать соответствующее изменение направления движения)
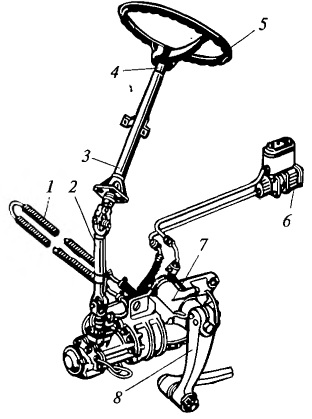
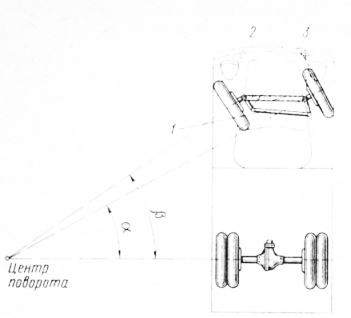
Рис. Рулевое управление:
1 — масляный радиатор; 2, 4 — валы; 3 — рулевая колонка; 5 — рулевое колесо; 6 — насос гидроусилителя руля; 7 — рулевой механизм; 8 — сошка
Система рулевого управления представляет собой совокупность устройств, служащих для поворота управляемых колес автомобиля при воздействии водителя на рулевой управляющий орган (рулевое колесо).
Устройство рулевого управления
Рассмотрим устройство рулевого управления колесных машин с управляемыми колесами. Конструктивно рулевое управление состоит из:
- рулевого механизма;
- усилителя;
- рулевого привода.
Компоновка рулевого управления грузового автомобиля с управляемыми колесами первой оси (КамАЗ, МАЗ) показана на рисунке. Использование регулируемых рулевых колонок позволяет менять угол наклона ступенчато, как правило, с шагом 5° в пределах до 40°. Рулевое управление с передними управляемыми колесами применяется у двух- и трехосных автомобилей. Компоновка и конструкция рулевого управления сравнительно просты и принципиально могут быть сведены к схемам, приведенным на рисунке.
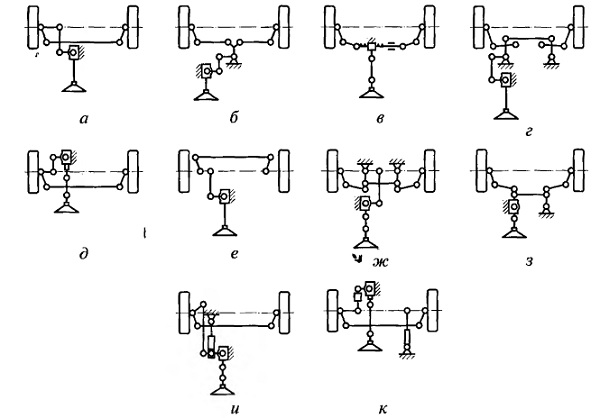
Рис. Схемы рулевого управления автомобилей с управляемыми колесами передней оси:
а — с задней неразрезной трапецией; б — с разрезной трапецией и маятниковым рычагом; в — с реечным рулевым механизмом; г — с разрезной трапецией и двумя маятниковыми рычагами; д — с расчлененным рулевым валом; е — с передней неразрезной трапецией; ж — с разрезной трапецией и двумя маятниковыми рычагами, направленными назад; з — с неразрезной трапецией и одним маятниковым рычагом; и — с неразрезной трапецией и объединенным рулевым усилителем; к — с неразрезной трапецией и раздельным рулевым усилителем
На четырехосных автомобилях чаще всего устанавливают рулевое управление с поворотом колес первой и второй осей, первой и четвертой, либо всех осей.
Для многоосных (шестиосных) шасси большой грузоподъемности используют рулевое управление с поворотом колес первых трех осей (в последних схемах для повышения маневренности применяют поворотные колеса самоустанавливающегося типа на шестой оси). При прямолинейном движении автомобиля самоустанавливающиеся колеса, связанные друг с другом приводом, блокируются специальным устройством. При движении в повороте с повышенной кривизной траектории эти колеса разблокируются и свободно поворачиваются в режиме слежения.
Назначение рулевого управления. Рулевое управление предназначено для обеспечения движения автомобиля по заданному водителем направлению. Оно состоит из рулевого механизма и рулевого привода. Конструкция рулевого механизма и рулевого привода должна обеспечить точность управления автомобилем, надежность работы всех узлов и деталей* не требовать от водителя затраты больших усилий и не передавать на рулевое колесо толчки, воспринимаемые колесами автомобиля.
Чтобы автомобиль двигался на повороте без бокового скольжения колес, все колеса должны совершать качение по дугам, описанным из одного центра, лежащего на продолжении задней оси автомобиля. При этом передние управляемые колеса автомобиля необходимо поворачивать на разные углы. Внутреннее (по отношению к центру поворота) колесо должно быть повернуто на больший угол, наружное колесо — на меньший угол. Такая схема поворота достигается применением в рулевом приводе трапеции с шарнирными соединениями.
Рулевой механизм. Существует несколько типов рулевого механизма. Наиболее распространенными из них являются червяк — ролик, червяк — сектор и винт — шариковая гайка.
Рекламные предложения на основе ваших интересов:
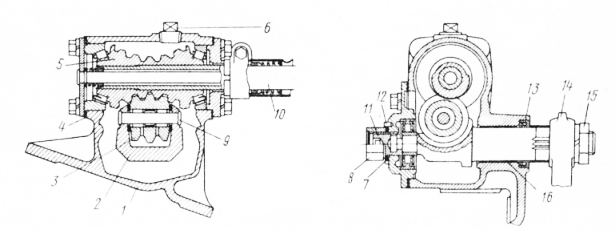
Рулевой механизм типа червяк — ролик применяется на большинстве легковых автомобилей и многих грузовых автомобилях. На рис. 1 показано устройство рулевого механизма этого типа автомобиля ГАЗ -53А. В картере рулевого механизма на двух конических роликовых подшипниках вращается глобоидальный червяк, установленный на конце вала руля.
В зацепление с червяком входит трехгребневый ролик, вращающийся на двух игольчатых подшипниках. Между подшипниками установлена распорная втулка. Ось ролика закреплена в головке вала рулевой сошки. Опорами вала рулевой сошки служат с одной стороны роликовый подшипник, а с другой — бронзовая втулка. Рулевая сошка соединена со своим валом мелкими шлицами и закреплена гайкой 15. Конец вала рулевой сошки уплотнен сальником. Для регулировки затяжки подшипников рулевого вала под нижней крышкой картера установлены прокладки.
Зацепление рабочей пары рулевого механизма выполнено таким образом, что при положении, соответствующем прямолинейному движению автомобиля, свободный ход рулевого колеса должен отсутствовать. По мере поворота руля в ту или иную сторону зазор между червяком и роликом и свободный ход I рулевого колеса возрастают. Регулировку зацепления червяка с роликом осуществляют смещением вала рулевой сошки в осевом на- I правлении при помощи регулировочного винта. Винт установлен в боковой крышке ! картера рулевого механизма, снаружи закрыт колпачковой гайкой 8 и фиксируется стопорной шайбой, закрепленной штифтом.
Рулевой механизм типа червяк — ролик обеспечивает наименьшие потери на трение. Благодаря этому требуется меньшее усилие водителя на управление автомобилем и снижается износ деталей.
У автомобилей большой грузоподъемности рулевой механизм имеет большее передаточное число для облегчения управления, при этом не допускается возникновения значительных удельных давлений между поверхностями рабочей пары.
В связи с этим на таких автомобилях применяют рулевой механизм типа червяк — сектор с большой поверхностью зацепления или механизм с двумя рабочими парами типа винт — гайка и рейка — сектор.
Рулевой механизм типа червяк — сектор наиболее прост по конструкции. В зацепление с глобоидальным червяком входит боковой сектор в виде части шестерни со спиральными зубьями, выполненный заодно целое с валом сошки. Зазор в зацеплении червяка с сектором не является постоянным. Наименьшее значение зазора соответствует среднему положению рулевого колеса.
При повороте рулевого колеса в ту или другую сторону величина зазора увеличивается в зависимости от угла поворота, достигая максимального значения в крайних положениях. Такое распределение зазора облегчает маневрирование с большими углами поворота руля и достигается постепенным понижением высоты зубьев сектора от середины к крайним точкам. При сборке правильность установки механизма проверяют по меткам, имеющимся на червяке и секторе.
Сошка посажена на вал, вращающийся в двух игольчатых подшипниках, между которыми установлена распорная втулка. При этом зазор в зацеплении червяк — сектор легко регулируется изменением толщины упорной шайбы, расположенной между боковой поверхностью сектора и крышкой картера рулевого механизма.
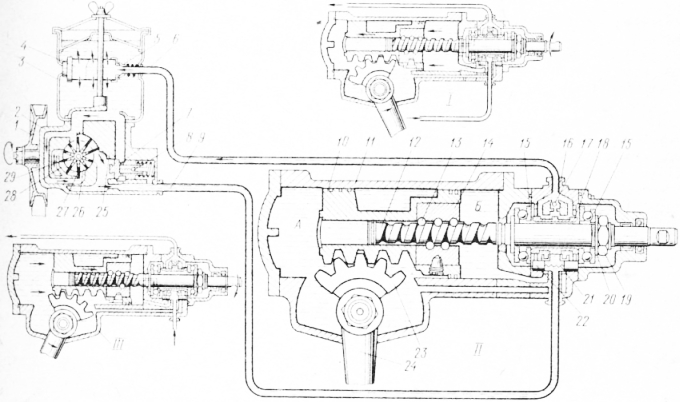
Рулевой механизм типа винт — гайка и рейка — сектор применяется на многих грузовых автомобилях ( ЗИЛ -130, КамАЗ всех моделей и др.), устройство его показано на рис. 3.
Вал рулевого механизма, установленный в шариковых подшипниках, имеет на конце винт. На винте закреплена шариковая гайка, входящая в поршень-рейку. При повороте рулевого вала рейка-поршень перемещается вдоль его оси. Осевое перемещение рейки-поршня, имеющей на наружной поверхности зубья, вызывает поворот зубчатого сектора, установленного на валу сошки. Сошка через рулевой привод осуществляет поворот передних колес.
В гайке и винте выполнены полукруглые винтовые канавки. В них свободно перекатываются шарики. Чтобы шарики не выпадали из винтовых канавок, в пазы гаики вставлены штампованные направляющие, представляющие собой замкнутый желоб. Поворот винта вызывает перекатывание шариков по желобу. При этом они выходят с одной стороны гайки и возвращаются в нее с противоположной стороны. Наличие шариков значительно облегчает поворачивание вала рулевого механизма.
Рулевой механизм соединен с валом рулевой колонки при помощи карданного вала с двумя шарнирами. Это вызвано трудностью размещения рулевого управления обычной конструкции на автомобиле, имеющем V-образный двигатель и максимально приближенную к нему кабину.
Травмобезопасная рулевая колонка. При фронтальных ударах автомобиля, в случае аварии, водитель может быть травмирован рулевым колесом. Чтобы максимально уменьшить опасность удара водителя о рулевое колесо, на легковых автомобилях последних моделей устанавливают трав-мобезопасную рулевую колонку. Так, на автомобиле «Москвич-1500» рулевая колонка телескопического типа состоит из трубчатых частей, которые могут входить одна в другую.
При ударе о рулевое колесо нижняя часть рулевого вала получает осевое перемещение в упругой с прорезями шлицевой втулке, а верхняя и нижняя части трубы рулевой колонки входят в среднюю часть трубы. Энергия удара поглощается трением между перемещающимися деталями.
Само рулевое колесо с утопленной ступицей и мягкой накладкой снижает опасность удара о него.
Водитель, наблюдая за дорогой, управляет автомобилем при помощи рулевого управления. Назначение рулевого управления — изменять направление движения автомобиля так, чтобы при повороте автомобиля качение его колес по дороге происходило по возможности без проскальзывания. Последнее очень важно, так как боковое скольжение шин вызывает их повышенный износ и ухудшает устойчивость движения автомобиля.
Рулевое управление состоит из рулевого механизма и рулевого привода. Иногда в рулевое управление включен усилитель.
Рулевым механизмом называют замедляющую передачу, преобразующую вращение вала рулевого колеса во Вращение вала сошки. Этот механизм увеличивает приложенное к рулевому колесу усилие водителя и облегчает его работу.
Рулевым приводом называют систему тяг и рычагов, осуществляющую в совокупности с рулевым механизмом поворот автомобиля. Рулевой привод (или рулевая трапеция) служит для поворота управляемых колес автомобиля на разные углы, что необходимо для качения колес без бокового проскальзывания. Рулевая трапеция представляет собой шарнирный четырехугольник, образуемый центральной частью передней оси, поперечной рулевой тягой и поворотными рычагами. Последние соединены с поворотными цапфами, на которых насажены управляемые колеса.
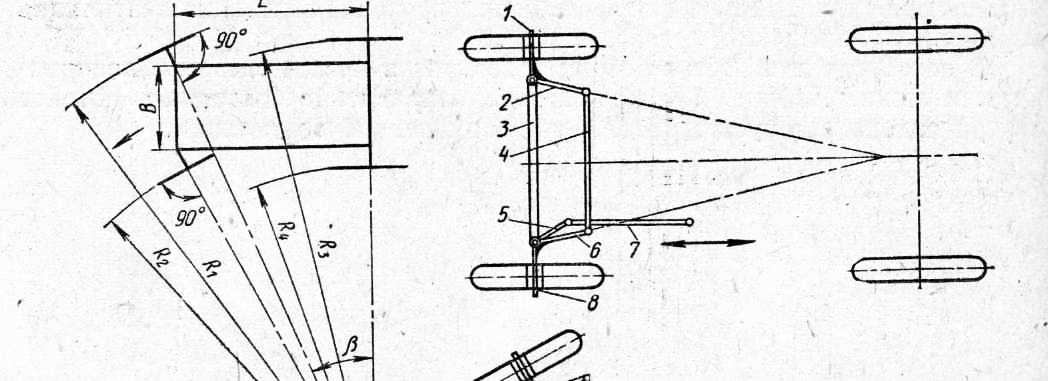
Рулевой механизм соединен с левой поворотной цапфой, продольной рулевой тягой и рычагом. Сошкой рулевого механизма перемещают продольную рулевую тягу вперед или назад, вызывая этим поворот управляемых колес влево или вправо.
Благодаря наличию рулевой трапеции управляемые колеса повертываются на разные углы: внутреннее (ближайшее к центру поворота) колесо на больший угол, чем внешнее. Разница в углах поворота определяется величиной угла наклона поворотных рычагов трапеции.
Схема рулевого привода передних управляемых колес, показанная на рис. 4, соответствует принятому на отечественных автомобилях расположению рулевого колеса при правостороннем движении.
Рулевое управление — одна из основных систем автомобиля, которая представляет собой совокупность узлов и механизмов, предназначенных для синхронизации положения рулевого колеса (руля) и угла поворота управляемых колес (в большинстве моделей автомобилей это передние колеса). Основное назначение рулевого управления для любых транспортных средств — это обеспечение поворота и поддержание заданного водителем направления движения.
Устройство системы рулевого управления
Конструктивно система рулевого управления состоит из следующих элементов:
- Рулевое колесо (руль) — предназначено для управления водителем с целью указания направления движения автомобиля. В современных моделях оно дополнительно оснащается кнопками управления мультимедийной системой. Также в рулевое колесо встраивается передняя подушка безопасности водителя.
- Рулевая колонка — выполняет передачу усилия от руля к рулевому механизму. Она представляет собой вал с шарнирными соединениями. Для обеспечения безопасности и защиты от угона колонка может быть оснащена электрическими или механическими системами складывания и блокировки. Дополнительно на рулевой колонке устанавливается замок зажигания, органы управления светотехникой и стеклоочистителем ветрового стекла автомобиля.
- Рулевой механизм — выполняет преобразование усилия, создаваемого водителем через поворот рулевого колеса и передает его приводу колес. Конструктивно представляет собой редуктор с некоторым передаточным отношением. Сам механизм соединяет с рулевой колонкой карданный вал рулевого управления.
- Рулевой привод — состоит из рулевых тяг, наконечников и рычагов, выполняющих передачу усилия от рулевого механизма к поворотным кулакам ведущих колес.
- Усилитель рулевого управления — повышает усилие, которое передается от руля к приводу.
- Дополнительные элементы (амортизатор рулевого управления или «демпфер», электронные системы).
Стоит также отметить, что подвеска и рулевое управление автомобиля имеют тесную взаимосвязь. Жесткость и высота первой определяют степень отклика автомобиля на вращение рулевого колеса.
Виды рулевого управления
В зависимости от типа редуктора системы, рулевой механизм (система рулевого управления) может быть следующих видов:
- Реечный — самый распространенный вид, используемый в легковых автомобилях. Этот вид рулевого механизма имеет простую конструкцию и отличается высоким КПД. Недостатки заключаются в том, что этот тип механизма чувствителен к возникающим ударным нагрузкам при эксплуатации в сложных дорожных условиях.
- Червячный — обеспечивает хорошую маневренность автомобиля и достаточно большой угол поворота колес. Этот вид механизма меньше подвержен влиянию ударной нагрузки, но более дорогостоящий в изготовлении.
- Винтовой — принцип работы похож на червячный механизм, однако он имеет более высокий КПД и позволяет создавать большие усилия.
В зависимости от вида усилителя, который предусматривает устройство рулевого управления, различают системы:
- С гидравлическим усилителем (ГУР). Его основным достоинством является компактность и простота конструкции. Гидравлическое рулевое управление среди современных транспортных средств является одним из наиболее распространенных. Недостатком такой системы является необходимость контроля уровня рабочей жидкости.
- С электрическим усилителем (ЭУР). Такая система рулевого управления с усилителем считается наиболее прогрессивной. Он обеспечивает простоту регулировки настроек управления, высокую надежность работы, экономный расход топлива и возможность управления автомобилем без участия водителя.
- С электрогидравлическим усилителем (ЭГУР). Принцип действия данной системы аналогичен системе с гидравлическим усилителем. Главное отличие заключается в том, что насос усилителя приводится в действие электродвигателем, а не ДВС.
Рулевое управление современного автомобиля может быть дополнено следующими системами:
- Активного рулевого управления (AFS) — система изменяет величину передаточного отношения в зависимости от текущей скорости. Она позволяет корректировать угол поворота колес и обеспечивает более безопасное и устойчивое движение на скользких поверхностях.
- Динамического рулевого управления — работает аналогично активной системе, однако в конструкции в этом случае вместо планетарного редуктора используется электродвигатель.
- Адаптивного рулевого управления для транспортных средств — главной особенностью является отсутствие жесткой связи между рулем автомобиля и его колесами.
Требования к рулевому управлению автомобиля
Согласно стандарту, к рулевому управлению применяются следующие основные требования:
- Обеспечение заданной траектории движения с необходимыми параметрами поворотливости, поворачиваемости и устойчивости.
- Усилие на рулевом колесе для осуществления маневра не должно превышать нормированного значения.
- Суммарное число оборотов руля от среднего положения до каждого из крайних не должно превышать установленного значения.
- При выходе из строя усилителя должна сохраняться возможность управления автомобилем.
Существует еще один стандартный параметр, определяющий нормальное функционирование рулевого управления — это суммарный люфт. Данный параметр представляет собой величину угла поворота руля до начала поворота управляемых колес.
Значение допустимого суммарного люфта в рулевом управлении должно быть в пределах:
- 10° для легковых автомобилей и микроавтобусов;
- 20° для автобусов и подобных транспортных средств;
- 25° для грузовых автомобилей.
Особенности правостороннего и левостороннего руля
В современных автомобилях может быть предусмотрено правостороннее или левостороннее рулевое управление, что зависит от вида транспортного средства и законодательства отдельных стран. В зависимости от этого руль может располагаться справа (при левостороннем движении) или слева (при правостороннем).
В большинстве стран левостороннее рулевое управление (или правостороннее движение). Основное отличие механизмов не только в позиции руля, но и в рулевом редукторе, который адаптирован под различные стороны подключения. С другой стороны, переоборудование правостороннего руля на левостороннее рулевое управление все же возможно.
В некоторых видах спецтехники, например, в тракторах, предусматривается гидрообъемное рулевое управление, которое обеспечивает независимость положения руля от компоновки других элементов. В этой системе отсутствует механическая связь привода и рулевого колеса. Для выполнения поворота колес гидрообъемное рулевое управление предусматривает силовой цилиндр, которым управляет насос-дозатор.
Основные достоинства, которые имеет гидрообъемное рулевое управление для транспортных средств в сравнении с классическим рулевым механизмом с гидравлическим усилителем: необходимость приложения меньших усилий для выполнения поворота, отсутствие люфта, а также возможность произвольного расположения узлов системы.
Таким образом, ГОРУ может обеспечивать и правостороннее, и левостороннее рулевое управление. Это позволяет его устанавливать в транспортных средствах с особыми режимами эксплуатации (дорожно-строительные машины, уборщики).